Учёные из Наньянского технологического университета совместно с коллегами из Японии создали первую в мире роботизированную линию для массового производства тараканов-киборгов. Это позволило отказаться от сложного ручного изготовления миниатюрных кибернетических организмов и перейти к унифицированным изделиям с более стабильными характеристиками. Такие преимущества приближают применение роев насекомых-киборгов для инспекций, разведки и помощи при стихийных бедствиях.

Один из главных факторов интереса к насекомым-киборгам — их высокая выносливость: современные аккумуляторы пока не обеспечивают достаточной ёмкости при компактных размерах. Хорошо накормленный таракан пробежит дальше и дольше, чем миниатюрный робот на полном заряде батареи, даже если та весьма совершенна. Тараканы-киборги могут проникать внутрь сложных конструкций и механизмов без необходимости их разборки или разрушения. Двигаясь роем, они способны быстро обследовать обширные и труднодоступные для людей и техники территории. Не случайно значительная часть нового бюджета Бундесвера будет направлена на развитие ИИ и биомеханических насекомых — это также стратегически важное направление для военных.
Для массового использования кибернасекомых важно наладить промышленное производство. Для отработки процесса учёные выбрали одних из самых крупных тараканов в мире — шипящих мадагаскарских тараканов, достигающих в длину 7 см. Современные электронные компоненты по-прежнему слишком тяжёлые для большинства насекомых, и размер здесь имеет значение.
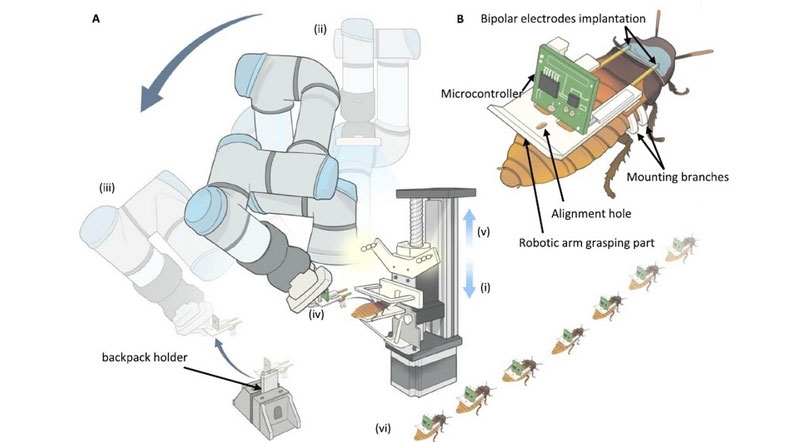
В качестве ключевого элемента сборочной линии использовали промышленный манипулятор Universal Robot UR3e с захватом, а также систему компьютерного зрения на базе камеры глубины Intel RealSense. В качестве наркоза для насекомых применялся углекислый газ. Электроника располагалась на небольшой платформе, которая, как рюкзак, закреплялась на спинке таракана. Для стимуляции нервной системы использовались два двухполярных электрода с иглами и крюками на концах — они вводились и закреплялись в теле насекомого в районе передних лап.
Сборка одного киборга занимала 68 секунд. Испытания показали, что насекомые, собранные вручную и на роботизированной линии, управлялись с одинаковой эффективностью. Поворот осуществлялся путём стимуляции одной из передних лапок, остановка — при стимуляции обеих. Эксперимент по роевому управлению показал, что четыре таракана-киборга обследовали почти всю заданную территорию за время, недоступное одному насекомому. У этой технологии хорошие перспективы: по крайней мере, автоматизация сборки ускорит дальнейшие исследования в этом направлении.